Bir skaler bağımsız değişkenin vektör fonksiyonunun limiti. Skaler argümanın dersler vektör fonksiyonu




Tanım 1. İzin verilen değerler aralığındaki skalerin her değeri, r vektörünün belirli bir değerine karşılık geliyorsa, bir r vektörüne t skaler argümanının bir vektör fonksiyonu denir. r, skaler argüman t'nin bir fonksiyonuysa, r vektörünün x, y, z koordinatları da t argümanının fonksiyonları olacaktır: Skaler argümanın vektör fonksiyonu. Hodograf. Bir skaler argümanın vektör fonksiyonunun limiti ve sürekliliği. Tersine, eğer g vektörünün koordinatları %t'nin fonksiyonlarıysa, o zaman g vektörünün kendisi t'nin bir fonksiyonu olacaktır: Böylece, r(f) vektör fonksiyonunun belirtilmesi şöyle olur: üç skaler fonksiyonun y(t), z(t) belirtilmesine eşdeğerdir. Tanım 2. Bir skaler argümanın r(t) vektör fonksiyonunun hodografı, skaler t değiştiğinde, r(f) vektörünün başlangıcı olduğunda, r(*) vektörünün sonunu tanımlayan noktaların lokusudur. uzayda sabit bir O noktasına yerleştirildi (Şekil I). Bıyık vektörü r = g(*) hareketi adına hodograf. 1 yanma noktası bu noktanın L yörüngesi olacaktır. Bu noktanın hız hodografı v = v(J), başka bir L\ doğrusu olacaktır (Şekil 2). Yani, eğer maddi bir nokta bir daire içinde sabit |v| hızıyla hareket ediyorsa = sabit ise hız hodografı da merkezi 0\ noktasında olan ve yarıçapı |v|'ye eşit olan bir dairedir. Örnek 1. r = ti + t\ + t\ vektörünün hodografını oluşturun. Çözüm. 1. Bu yapı bir tablo oluşturularak nokta nokta yapılabilir: Şekil 3 2i Siz de aynısını yapabilirsiniz. V vektörünün koordinatlarını x, y, z ile göstererek, Hts'ye sahip olacağız ve bu denklemlerin anahtarı 1Y parametresidir, L kesişim çizgisi hodografı belirleyecek olan y - z = x1 yüzeylerinin denklemlerini elde ederiz. z() vektörünün (Şekil 3). D> Görevler. Vektörlerin hodograflarını oluşturun: r = skaler argüman t vektör fonksiyonu, t argümanının değerinin bazı komşuluklarında tanımlansın, ancak aynı değer için uzantı 1 hariç. А sabit vektörüne limit denir. r(t) vektörü, eğer herhangi bir e > 0 için b > 0 varsa, öyle ki, 11 koşulunu sağlayan tüm t φ'ler için eşitsizlik geçerlidir. Geleneksel analizde olduğu gibi, limr(0=A) yazın. Şekil 4 Geometrik olarak, bu, vektörün t -* olarak Ve vektörüne hem uzunluk hem de yön olarak yöneldiği anlamına gelir (Şekil 4). Tanım 2. Eğer a(£)'nun t -* to'da bir limiti varsa ve bu limit sıfıra eşitse, a(£) vektörünün t -» to'da sonsuz küçük olduğu söylenir: Bir skaler argümanın vektör fonksiyonu. Hodograf. Bir skaler argümanın vektör fonksiyonunun limiti ve sürekliliği veya aynısı, herhangi bir e için 6 > 0 vardır, öyle ki koşulu sağlayan tüm t Ф için |a(£)| eşitsizliği Örnek 1. t -* 0 için vektörün sonsuz kırmızı bir vektör olduğunu gösterin. Çözüm. Herhangi bir e 0 için 6 = ~ alırsak o zaman -0| | işaretleyeceğiz. Tanıma göre bu, a(t)'nin t 0'da sonsuz bir vektör olduğu anlamına gelir. 1> r'yi bağımsız olarak çözmeye yönelik problemler Bir vektörün modülünün limitinin, ikinci limit olması durumunda, limitinin modülüne eşit olduğunu gösterin. var. . r(*) vektör fonksiyonunun A'da bir limite sahip olması için, r('nin bir skaler argümanın bir Vektör fonksiyonu olarak temsil edilebilmesinin gerekli ve yeterli olduğunu kanıtlayın. Hodograf. Bir vektör fonksiyonunun limiti ve sürekliliği de a( t) skaler argümanı t -* t0 için sonsuz bir vektördür. 14. a+ b(*) vektör fonksiyonu t = t0 için süreklidir. Buradan a(t) ve b(J) vektörlerinin çıktığı sonucu çıkar mı? t - ile ? 15 arasında da süreklidir. Eğer a() sürekli vektör fonksiyonları ise, bunların ne olduğunu kanıtlayın. nokta çarpım(a(*),b(f)) ve |a(f),b(t)] vektör çarpımı da süreklidir.
Skaler argümanın vektör fonksiyonunun değerler kümesinin 0 noktasındaki ortak orijine indirgenmesine izin verin. Kartezyen koordinat sisteminin orijinini bu noktayla eşleştirelim. Daha sonra herhangi bir vektör için birim vektörlere genişletilebilir
Dolayısıyla, bir skaler argümanın vektör fonksiyonunu belirtmek, üç skaler fonksiyonu belirtmek anlamına gelir ![]() Argümanın değeri değiştiğinde, vektörün sonu uzayda vektör hodografı adı verilen bir eğriyi tanımlayacaktır.
Argümanın değeri değiştiğinde, vektörün sonu uzayda vektör hodografı adı verilen bir eğriyi tanımlayacaktır.
Var olmasına izin ver yakın değer ![]() Daha sonra bir vektör fonksiyonunun skaler argümana türevi denir
Daha sonra bir vektör fonksiyonunun skaler argümana türevi denir 

No. 17 Eğrisel harekette bir noktanın hızı ve ivmesi
Hız
Hız, hareket özelliği olarak girilir maddi nokta. Hız, hem hareket hızı (hız vektör büyüklüğü) hem de yönü (hız vektör yönü) ile karakterize edilen bir vektör miktarıdır. şu anda zaman. Maddi bir noktanın eğrisel bir yörünge boyunca hareket etmesine izin verin ve t zamanında r0 yarıçap vektörüne karşılık gelir (Şekil 1). Kısa bir Δt zaman periyodunda nokta Δs yol alacak ve aynı zamanda temel (sonsuz küçük) bir Δr yer değiştirmesini alacaktır.

Ortalama hız vektörü
Ortalama hız vektörünün yönü Δr yönü ile çakışmaktadır. Δt'deki sonsuz bir azalmayla ortalama hız, anlık hız v olarak adlandırılan bir değere yönelir:
![]()
Bu, anlık hızın v, hareket eden noktanın yarıçap vektörünün zamana göre birinci türevine eşit bir vektör miktarı olduğu anlamına gelir. Çünkü limitte sekant teğet ile çakışır, ardından hız vektörü v hareket yönünde yörüngeye teğet olarak yönlendirilir (Şekil 2).
 Şekil 2
Şekil 2
Δt azaldıkça Δs giderek |Δr|'ye yaklaşacaktır, dolayısıyla anlık hız modülü
Bu, anlık hızın mutlak değerinin yolun zamana göre birinci türevine eşit olduğu anlamına gelir:
Değilse düzgün hareket Anlık hız modülü farklı zamanlarda farklıdır. Bu durumda skaler miktarı kullanın
Eğer ds=vdt ifadesini zaman içinde t ila t+Δt aralığında entegre edersek (bkz. formül (2)), Δt süresi boyunca noktanın kat ettiği yolun uzunluğunu bulacağız:
Düzgün hareket durumunda sayısal değer sürekli anlık hız; Daha sonra ifade (3) şu şekli alacaktır:
![]()
Bir noktanın t1'den t2'ye kadar geçen süre boyunca kat ettiği yolun uzunluğu integral ile verilir.
HIZLANMA
Dengesiz sürüş sırasında hızın zaman içinde ne kadar hızlı değiştiğini bilmek genellikle gereklidir. Fiziksel boyut Hızın büyüklük ve yöndeki değişim oranını karakterize eden hızlanma denir. Düzlemsel hareketi ele alalım; söz konusu sistemin her noktasının yörüngelerinin aynı düzlemde olduğu hareket. v vektörü A noktasının t zamanındaki hızı olsun. Δt süresi boyunca nokta B konumuna hareket etti ve hem büyüklük hem de yön bakımından v'den farklı ve v1 + Δv'ye eşit bir hız aldı. v1 vektörünü A noktasına taşıyıp Δv'yi bulalım (Şekil 1).
T'den t+Δt'ye kadar olan aralıktaki düzensiz hareketin ortalama ivmesi bir vektör miktarıdır, orana eşitΔv hızının Δt zaman aralığına değişimi:
Maddi bir noktanın t zamanındaki anlık ivmesi a (ivmesi) bir vektör miktarı olacaktır:
hızın zamana göre birinci türevine eşittir.
Δv vektörünü iki bileşene ayıralım. Bunu yapmak için A noktasından (Şekil 1) v hızı yönünde modülü v1'e eşit olan AD vektörünü çizeriz. Açıkçası, Δvτ'ye eşit olan CD vektörü, Δt modulo zaman içinde hızdaki değişimi belirler: Δvτ=v1-v. Δv vektörünün ikinci bileşeni Δvn, hızın Δt yönünde zaman içindeki değişimini karakterize eder.
İvmenin teğetsel bileşeni:
yani hız modülünün zamana göre birinci türevine eşittir, dolayısıyla modüldeki hızın değişim oranını belirler.
Hızlanmanın ikinci bileşenini arıyoruz. B noktasının A noktasına çok yakın olduğunu varsayıyoruz, dolayısıyla Δs, AB kirişinden biraz farklı, r yarıçaplı bir dairenin yayı olarak düşünülebilir. AOB üçgeni, Δvn/AB=v1/r sonucunu takip eden EAD üçgenine benzer, ancak AB=vΔt olduğundan, o zaman
Δt→0 limitinde v1→v elde ederiz.

Çünkü v1→v, EAD açısı sıfıra yönelir ve bu yana EAD üçgeni ikizkenar ise v ve Δvn arasındaki ADE açısı dik açıya yönelir. Sonuç olarak, Δt→0'da Δvn ve v vektörleri karşılıklı olarak dik hale gelir. Çünkü hız vektörü yörüngeye teğet olarak yönlendirilir, daha sonra hız vektörüne dik olan Δvn vektörü, noktanın yörüngesinin eğrilik merkezine yönlendirilir. İvmenin ikinci bileşeni, şuna eşittir:
![]()
ivmenin normal bileşeni olarak adlandırılır ve yörüngenin (normal olarak adlandırılır) teğetine dik bir düz çizgi boyunca eğriliğinin merkezine yönlendirilir (bu nedenle merkezcil ivme olarak da adlandırılır).
Vücudun toplam ivmesi geometrik toplam teğetsel ve normal bileşenler (Şekil 2):

Bu, ivmenin teğetsel bileşeninin, mutlak değerdeki hızdaki değişim oranının bir özelliği olduğu (yörüngeye teğetsel olarak yönlendirilmiş) ve hızlanmanın normal bileşeninin, yöndeki hız değişim oranının (yörüngeye doğru yönlendirilmiş) bir özelliği olduğu anlamına gelir. yörüngenin eğrilik merkezi). İvmenin teğetsel ve normal bileşenlerine bağlı olarak hareket şu şekilde sınıflandırılabilir:
1)aτ=0, an=0 - doğrusal düzgün hareket;
2)aτ=an=sabit, аn=0 - doğrusal düzgün hareket. Bu tür hareketlerle
Başlangıç zamanı t1 = 0 ve başlangıç hızı v1 = v0 ise, t2=t ve v2 = v'yi ifade ederek a=(v-v0)/t elde ederiz;
Bu formülü sıfırdan keyfi bir t zaman aralığına kadar entegre ettikten sonra, düzgün değişken hareket durumunda bir noktanın kat ettiği yolun uzunluğunu buluruz.
3)aτ=f(t), an=0 - düz hareket değişken ivmeli;
4)aτ=0, an=sabit. aτ=0 olduğunda hızın mutlak değeri değişmez, yönü değişir. an=v2/r formülünden eğrilik yarıçapının sabit olması gerektiği sonucu çıkar. Bu nedenle dairesel hareket düzgündür; düzgün eğrisel harekettir;
5)aτ=0, an≠0 düzgün eğrisel hareket;
6)aτ=sabit, an≠0 - eğrisel düzgün hareket;
7)aτ=f(t), an≠0 - değişken ivmeli eğrisel hareket.
No. 18 Teğet Düzlem ve Yüzeye Normal Denklemler
Tanım. Bir D bölgesinde z =f(x,y) iki değişkenli bir fonksiyon verilse, M0(x0;y0) D bölgesinin bir iç noktasıdır, M(x0+Δx;y+Δy) D bölgesinde bir noktadır D “komşu” M0.
Fonksiyonun tam artışını düşünün:
Δz şu şekilde temsil edilirse:
burada A, B sabitlerdir (Δx, Δy'den bağımsız), ![]() - M ve M0 arasındaki mesafe, α(Δ x,Δy) - Δx 0, Δy 0'da sonsuz küçük; bu durumda z =f(x,y) fonksiyonuna M0 noktasında türevlenebilir denir ve ifade
- M ve M0 arasındaki mesafe, α(Δ x,Δy) - Δx 0, Δy 0'da sonsuz küçük; bu durumda z =f(x,y) fonksiyonuna M0 noktasında türevlenebilir denir ve ifade

z =f(x;y) fonksiyonunun M0 noktasındaki toplam diferansiyeli denir.
Teorem 1.1. Eğer z =f(x;y) M0 noktasında türevlenebilirse, o zaman
Kanıt
(1.16)'da Δx, Δy keyfi sonsuz küçükler olduğundan, Δy =0, Δx≠0, Δx 0 alabiliriz, o zaman
![]()
bundan sonra (1.16)'dan şu sonuç çıkar:

Benzer şekilde, kanıtlanmıştır ki
ve Teorem 1.1. kanıtlanmış.
Not: z =f(x,y)'nin M0 noktasındaki türevlenebilirliği kısmi türevlerin varlığına işaret eder. Tersi ifade yanlıştır (M0 noktasında kısmi türevlerin varlığı, M0 noktasında türevlenebilirlik anlamına gelmez).
Sonuç olarak, Teorem 1.1 dikkate alındığında formül (1.18) şu şekli alacaktır:
Sonuçlar. M0 noktasında türevi alınabilen bir fonksiyon bu noktada süreklidir ((1.17)'den Δx 0, Δy 0 için: Δz 0, z(M) z(M0) çıkar).
Not: Benzer şekilde üç veya daha fazla değişken olması durumunda. İfade (1.17) şu şekli alacaktır:

Kısmi türevlerin geometrik anlamını (Şekil 1.3) kullanarak, yüzeye πcass teğet düzleminin aşağıdaki denklemini (1.24) elde edebiliriz: C0(x0,y0,z0) noktasında z =f(x,y), z0=z(M):
(1.24) ve (1.21)'in karşılaştırılmasından geometrik anlamı elde ederiz tam diferansiyel iki değişkenli fonksiyonlar:
C noktası teğet bir düzlem boyunca C0 noktasından noktaya hareket ettiğinde uygulanan z'nin artışı
(1.24) nereden geliyor?
C0 noktasındaki normal Lн'nin yüzeye olan denklemi: z = f(x,y), teğet düzleme dik olarak C0'dan geçen bir doğrunun denklemi olarak elde edilir:
No. 19 Yönlü türev. Gradyan
Bazı etki alanlarında bir fonksiyon verilsin ![]() ve dönem
ve dönem ![]() . Yönü kosinüs olan noktadan bir vektör çizelim.
. Yönü kosinüs olan noktadan bir vektör çizelim. ![]() . Vektör üzerinde, başlangıcından belli bir mesafede bir nokta düşünün; .
. Vektör üzerinde, başlangıcından belli bir mesafede bir nokta düşünün; .
Fonksiyonun olduğunu varsayacağız. ![]() ve birinci dereceden kısmi türevleri bölgede süreklidir.
ve birinci dereceden kısmi türevleri bölgede süreklidir.
Oranın limitine fonksiyonun türevi denir ![]() bu noktada
bu noktada ![]() vektör yönünde ve gösterilir, yani. .
vektör yönünde ve gösterilir, yani. .
Bir fonksiyonun türevini bulmak için ![]() belirli bir noktada
belirli bir noktada ![]() vektör yönünde
vektör yönünde ![]() formülü kullanın:
formülü kullanın:
Nerede ![]() – vektörün yön kosinüsleri
– vektörün yön kosinüsleri ![]() aşağıdaki formüllerle hesaplanır:
aşağıdaki formüllerle hesaplanır:  .
.
Belirli bir bölgenin her noktasında bir fonksiyon belirtilsin ![]() .
.
Koordinat eksenleri üzerindeki izdüşümleri, bu fonksiyonun karşılık gelen noktadaki kısmi türevlerinin değerleri olan bir vektöre, fonksiyonun gradyanı denir. ![]() ve belirtilir veya (“nabla u” okuyun): .
ve belirtilir veya (“nabla u” okuyun): .
Bu durumda bölgede gradyanlardan oluşan bir vektör alanının tanımlandığını söylüyorlar.
Bir fonksiyonun gradyanını bulmak için ![]() belirli bir noktada
belirli bir noktada ![]() şu formülü kullanın: .
şu formülü kullanın: .
22 numaranın ana özellikleri belirli integral
Belirsiz integral
![]()
nerede F- fonksiyonun antiderivatifi f (aralıkta); C keyfi bir sabittir.
Temel özellikler
1. ![]()
![]()
2. ![]()
![]()
3. Eğer ![]() O
O
24) 
25) 
28) 
Bu yöntem, integralin heterojen fonksiyonların bir ürünü veya bölümü olduğu durumlarda kullanılır. Bu durumda V’(x) entegrasyonu kolay olan parça olarak alınır.
29) 
32) Rasyonel bir kesirin basit kesirlere ayrıştırılması.
Herhangi bir doğru rasyonel kesir  birinci - dördüncü türlerin sonlu sayıda basit rasyonel kesirlerinin toplamı olarak temsil edilebilir. Ayrışma için paydayı basit kesirlere genişletmek gerekir Qm(x) Denklemi çözmeniz gereken doğrusal ve kare faktörlere:
birinci - dördüncü türlerin sonlu sayıda basit rasyonel kesirlerinin toplamı olarak temsil edilebilir. Ayrışma için paydayı basit kesirlere genişletmek gerekir Qm(x) Denklemi çözmeniz gereken doğrusal ve kare faktörlere:
 - (5)
- (5)
Teorem.Uygun rasyonel kesir , Nerede  , benzersiz bir şekilde basit kesirlerin toplamına ayrıştırılabilir:
, benzersiz bir şekilde basit kesirlerin toplamına ayrıştırılabilir:

 - (6)
- (6)
(A 1 , A 2 , …, A k , B 1 , B 2 , …, B 1 , M 1 , N 1 , M 2 , M 2 , …, M s , N s – bazı gerçek sayılar).
33) Uygun bir kesirin paydanın karmaşık köklerine sahip basit kesirlere ayrıştırılması
Sorunun beyanı. Belirsiz integrali bulun
1 . Aşağıdaki gösterimi tanıtalım:
Pay ve paydanın derecelerini karşılaştıralım.
İntegral uygunsuz bir rasyonel kesir ise, yani; pay derecesiN paydanın kuvvetine eşit veya ondan büyükM , ardından önce parçanın tamamını seçin rasyonel fonksiyon payı paydaya bölerek:

Burada polinom, bölmenin kalanı ve derecedir.Pk(x) daha az dereceQm
2 . Uygun rasyonel kesri genişletelim
temel kesirlere.
Paydasının basit karmaşık kökleri varsa;
o zaman genişleme şu şekle sahiptir
3 . Belirsiz katsayıları hesaplamak için,A1,A2,A3...B1,B1,B3... özdeşliğin sağ tarafındaki kesri ortak bir paydaya getiriyoruz, ardından katsayıları aynı kuvvetlere eşitliyoruzX soldaki ve sağdaki paylarda. Sistemi alalım 2 S ile denklemler 2 S bilinmeyen, benzersiz bir çözümü olan.
4 Formun temel kesirlerini entegre ediyoruz
47) İntegral toplamının λ → 0 şeklinde sonlu bir limiti I varsa ve bu, ξ i noktaları seçme yöntemine, parçayı bölme yöntemine bağlı değilse, bu sınıra f fonksiyonunun belirli integrali denir ( x) segment üzerinde ve aşağıdaki gibi gösterilir:

 Bu durumda f(x) fonksiyonunun üzerinde integrallenebilir olduğu söylenir. A ve b sayılarına sırasıyla entegrasyonun alt ve üst limitleri denir, f(x) integral, x ise entegrasyonun değişkenidir. Belirli bir integralin integral değişkenini hangi harfin gösterdiğinin önemli olmadığı unutulmamalıdır.
Bu durumda f(x) fonksiyonunun üzerinde integrallenebilir olduğu söylenir. A ve b sayılarına sırasıyla entegrasyonun alt ve üst limitleri denir, f(x) integral, x ise entegrasyonun değişkenidir. Belirli bir integralin integral değişkenini hangi harfin gösterdiğinin önemli olmadığı unutulmamalıdır.
çünkü bu tür gösterimlerin değiştirilmesi hiçbir şekilde integral toplamın davranışını etkilemez. Gösterim ve terminolojideki benzerliğe rağmen, belirli ve belirsiz integraller farklı


48) Belirli bir integralin varlığına ilişkin teorem
Parçayı x1,x2,x3 noktalarına göre parçalara bölelim... yani
i'inci parçanın uzunluğunu deltaX ile ve bu uzunlukların maksimumuyla gösterelim.
Her parça üzerinde keyfi olarak belirli bir nokta seçelim, böylece (“orta nokta” denir) ve oluşturalım.
![]()
integral toplamı adı verilen bir miktar
Şimdi limiti bulalım

Tanım. Varsa ve ona bağlı değilse
a) bir segmenti parçalara bölme yöntemi ve
b) orta noktayı seçme yöntemi,
f(x) fonksiyonunun segmenti üzerinde belirli bir integralidir.
Bu durumda f(x) fonksiyonuna aralıkta integrallenebilir denir. a ve b miktarlarına sırasıyla entegrasyonun alt ve üst limitleri denir.
50) Belirli bir integralin temel özellikleri
1) İntegral aralığı sonlu sayıda kısmi aralığa bölünürse aralık üzerinden alınan belirli integral, toplamına eşit tüm kısmi aralıkları üzerinden alınan belirli integraller.
![]()
2) ortalama değer teoremi.
y = f(x) fonksiyonu ,m=min f(x) ve M=max f(x) aralığında integrallenebilir olsun, o zaman böyle bir sayı vardır

Sonuçlar.
Eğer y = f(x) fonksiyonu aralıkta sürekli ise öyle bir sayı vardır.

![]() 3) İntegral limitleri yeniden düzenlenirken belirli integralin işareti ters yönde değişir.
3) İntegral limitleri yeniden düzenlenirken belirli integralin işareti ters yönde değişir.
4) Aynı integral limitlerine sahip belirli bir integral sıfıra eşittir.
5) Fonksiyon modülünün entegrasyonu
Eğer f(x) fonksiyonu integrallenebilirse, modülü de aralıkta integrallenebilirdir.

6) Eşitsizliğin entegrasyonu
Eğer f(x) ve q(x) bir aralıkta integrallenebilirse ve x,
 O
O
7)Doğrusallık
Sabit faktör belirli integralin işaretinin ötesine alınabilir
f(x) mevcutsa ve aralıkta integrallenebilirse, A=sabit

Eğer y=f(x) fonksiyonu bir aralıkta sürekli ise ve F(x) onun (F’(x)=f(x)) üzerindeki ters türevlerinden herhangi biri ise, o zaman formül geçerlidir
Sürekli bir fonksiyonun integralini hesaplamak için x=α(t) yerine koyma işlemi yapılsın.
1) x=α(t) fonksiyonu ve onun türevi x’=α’(t), t’ye ait olduğu için süreklidir.
2) x=α(t) fonksiyonunun t'deki değer kümesi segmente aittir
3) A α(c)=a ve α(v)=b
f(x) fonksiyonu aralıkta sürekli olsun ve x=b'de sonsuz bir süreksizliği olsun. Eğer bir limit mevcutsa buna ikinci türden uygunsuz integral denir ve ile gösterilir.
Dolayısıyla tanım gereği,
Sağ taraftaki limit mevcutsa, o zaman uygunsuz integral yakınsar. Belirtilen limit mevcut değilse veya sonsuzsa, o zaman integralin olduğunu söylerler. ayrışır.



ve farklılaşması.
Uzamsal bir eğriyi belirlemenin en basit yollarından biri bir vektör denklemi belirlemektir:
Nerede  eğri noktasının yarıçap vektörüdür ve
eğri noktasının yarıçap vektörüdür ve  - noktanın konumunu belirleyen parametre.
- noktanın konumunu belirleyen parametre.
O. değişken vektör  skaler bir fonksiyon var
skaler bir fonksiyon var  . Matematiksel analizde bu tür fonksiyonlara skaler argümanın vektör fonksiyonları denir.
. Matematiksel analizde bu tür fonksiyonlara skaler argümanın vektör fonksiyonları denir.
Ayrıştırma  Birim vektörler kullanılarak denklem (1) şu şekilde verilebilir:
Birim vektörler kullanılarak denklem (1) şu şekilde verilebilir:
Bu genişletme, eğrinin parametrik denklemine geçmeyi mümkün kılar:
Başka bir deyişle, bir vektör fonksiyonunu belirtmek, üç skaler fonksiyonu belirtmekle eşdeğerdir.
Bu eğriyi tanımlayan vektör fonksiyonu (1) ile ilişkili olarak eğrinin kendisi, bu fonksiyonun hodografı olarak adlandırılır. Koordinatların orijini bu durumda hodografın kutbu olarak adlandırılır.
Şimdi izin ver  Ve
Ve  - denklem (1) ile tanımlanan eğrinin noktaları. Dahası
- denklem (1) ile tanımlanan eğrinin noktaları. Dahası  , A
, A  Bu noktaların yarıçap vektörleri şöyle olacaktır:
Bu noktaların yarıçap vektörleri şöyle olacaktır:
 Ve
Ve  .
.
Vektör  bir vektör fonksiyonunun artışı denir
bir vektör fonksiyonunun artışı denir  , artışa karşılık gelen
, artışa karşılık gelen  argümanı ve ile gösterilir
argümanı ve ile gösterilir  ,
,
Vektör işlevi  sürekli bir fonksiyon olacak
sürekli bir fonksiyon olacak  , Eğer
, Eğer
 .
.
Türevini bulmak için  şu şekilde ilerleyelim -
şu şekilde ilerleyelim -
 .
.
Şimdi yönümüzü belirleyelim  . Açıkça görülüyor ki
. Açıkça görülüyor ki  ile doğrudaş olmak
ile doğrudaş olmak  ve
ve  ile aynı yöne yönlendirilmiş
ile aynı yöne yönlendirilmiş  ve ne zaman
ve ne zaman  -V karşı taraf. Ama ilk durumda
-V karşı taraf. Ama ilk durumda  ve ikincisinde
ve ikincisinde  O. vektör
O. vektör  her zaman sekant hodografı boyunca yönlendirilir
her zaman sekant hodografı boyunca yönlendirilir  yukarı
yukarı  .
.
Genişletmeyi kullanırsak  Ve
Ve  o zaman orts tarafından
o zaman orts tarafından
Buradan (*)'a bölerek  ve sınıra gidiyorum
ve sınıra gidiyorum  İçin
İçin  alıyoruz
alıyoruz
(4)’e dayanarak aşağıdaki formüllerin geçerli olduğu gösterilebilir:
(5) 
(6) 
 - skaler fonksiyon.
- skaler fonksiyon.

Kanıt (7).
Şimdi bazı özellikleri inceleyelim  . Öncelikle modülünü bulalım:
. Öncelikle modülünü bulalım:
 .
.
Çünkü hodograf yayının düzeltilebilir olduğunu düşünüyoruz, o zaman  - akorun uzunluğu ve
- akorun uzunluğu ve  - yay uzunluğu. Bu yüzden
- yay uzunluğu. Bu yüzden

O. bir skaler argümanın vektör fonksiyonunun türevinin modülü, aynı argümana göre hodograf yayının türevine eşittir.
Sonuç 1. Eğer  - hodografa artış yönünde teğet olarak yönlendirilen birim vektör
- hodografa artış yönünde teğet olarak yönlendirilen birim vektör  , O
, O

Sonuç 2. Hodograf yayının uzunluğu vektör fonksiyonunun argümanı olarak alınırsa  , O
, O
 (Çünkü
(Çünkü  )
)

O. Hodograf yayının uzunluğu boyunca vektör fonksiyonunun türevi, yayın uzunluğunu arttırmaya yönelik hodografa teğet birim vektörüne eşittir.
Sonuç 3. Bir vektör fonksiyonunun hodografı bir noktanın yörüngesi olarak kabul edilirse ve  - belirli bir süreden itibaren sayılan hareket süresi olarak
- belirli bir süreden itibaren sayılan hareket süresi olarak  , O
, O  büyüklüğü ve yönü hareket hızı vektörüyle çakışır
büyüklüğü ve yönü hareket hızı vektörüyle çakışır  .
.
Aslında hızın skaler değeri yolun zamana göre türevine eşittir:

Ayrıca vektör  artış yönüne karşılık gelen hareket yönündeki yörüngeye teğet olarak yönlendirilir
artış yönüne karşılık gelen hareket yönündeki yörüngeye teğet olarak yönlendirilir  , yani yöne karşılık gelir
, yani yöne karşılık gelir  .
.
O.  .
.
Şimdi düşünelim  uzunluğu sabit olan,
uzunluğu sabit olan,  , yani
, yani
(*)  Nerede
Nerede 
Farklılaştırarak (*), şunu buluruz:
Onlar. 
Özellikle herhangi bir değişkenin bir vektörünün birim yönünde türevi  Her zaman
Her zaman  .
.
Şimdi izin ver  birim kürenin yarıçapları arasındaki noktalara çizilen açı
birim kürenin yarıçapları arasındaki noktalara çizilen açı  Ve
Ve  hodograf
hodograf  . Daha sonra akor uzunluğu
. Daha sonra akor uzunluğu  bir üçgenden
bir üçgenden  eşit olacak
eşit olacak

Birim değişken vektörünün türevinin büyüklüğü, bu vektörün açısal dönme hızına eşittir.
Skaler fonksiyonlara gelince, bir vektör fonksiyonunun diferansiyeli şu şekilde yazılır:

Ama o zaman bile

Uzaysal bir eğrinin eğriliği.
Eşlik eden trihedron.
Sonuç 2'ye göre,  formülü yazabiliriz:
formülü yazabiliriz:

Yön değiştirme  uzaysal eğriye teğetteki bir değişiklikle ilişkili olarak eğrinin eğriliğini karakterize eder. Uzaysal bir eğrinin eğriliğinin bir ölçüsü olarak, bir düzlem eğri için olduğu gibi, bitişiklik açısının yayın uzunluğuna oranının sınırı alınır:
uzaysal eğriye teğetteki bir değişiklikle ilişkili olarak eğrinin eğriliğini karakterize eder. Uzaysal bir eğrinin eğriliğinin bir ölçüsü olarak, bir düzlem eğri için olduğu gibi, bitişiklik açısının yayın uzunluğuna oranının sınırı alınır: 
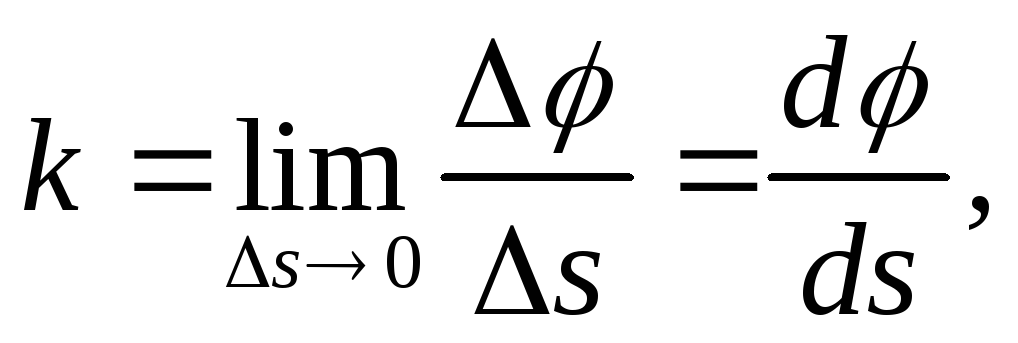
 eğrilik,
eğrilik,  bitişiklik açısı,
bitişiklik açısı,  yay uzunluğu.
yay uzunluğu.
Diğer tarafta,  birim vektör ve türev vektörü
birim vektör ve türev vektörü  ona diktir ve modülü
ona diktir ve modülü  Farklılaştırıcı
Farklılaştırıcı  İle
İle  ve giriyorum
ve giriyorum  yönlü birim vektör
yönlü birim vektör  , şunu buluyoruz:
, şunu buluyoruz:

Vektör  bir uzay eğrisinin eğrilik vektörü. Teğet yöne dik olan yönü, uzay eğrisinin normal yönüdür. Ancak bir uzaysal eğrinin herhangi bir noktada sonsuz sayıda normali vardır ve bunların tümü eğrinin belirli bir noktasından geçen ve belirli bir noktadaki teğete dik olan bir düzlemde yer alır. Bu düzleme uzaysal eğrinin normal düzlemi denir.
bir uzay eğrisinin eğrilik vektörü. Teğet yöne dik olan yönü, uzay eğrisinin normal yönüdür. Ancak bir uzaysal eğrinin herhangi bir noktada sonsuz sayıda normali vardır ve bunların tümü eğrinin belirli bir noktasından geçen ve belirli bir noktadaki teğete dik olan bir düzlemde yer alır. Bu düzleme uzaysal eğrinin normal düzlemi denir.
Tanım. Eğrinin eğrilik vektörünün belirli bir noktaya yönlendirildiği eğrinin normali, uzaysal eğrinin ana normalidir. O.  birim temel normal vektör.
birim temel normal vektör.
Şimdi üçüncü birim vektörü oluşturalım  çapraz çarpıma eşit
çapraz çarpıma eşit  Ve
Ve 

Vektör  , birlikte
, birlikte  aynı zamanda dik
aynı zamanda dik  onlar. yatıyor normal düzlem. Yönüne, belirli bir noktadaki uzaysal eğrinin binormalinin yönü denir. Vektör
onlar. yatıyor normal düzlem. Yönüne, belirli bir noktadaki uzaysal eğrinin binormalinin yönü denir. Vektör  Ve
Ve  yönü noktanın uzaysal eğri üzerindeki konumuna bağlı olan ve noktadan noktaya değişen karşılıklı dik birim vektörlerin üçlüsünü oluşturur. Bu vektörler sözde oluşturur. uzaysal bir eğrinin eşlik eden trihedron'u (Frenet trihedron). Vektör
yönü noktanın uzaysal eğri üzerindeki konumuna bağlı olan ve noktadan noktaya değişen karşılıklı dik birim vektörlerin üçlüsünü oluşturur. Bu vektörler sözde oluşturur. uzaysal bir eğrinin eşlik eden trihedron'u (Frenet trihedron). Vektör  Ve
Ve  tıpkı birim birim vektörler gibi bir dik üçlü oluşturur
tıpkı birim birim vektörler gibi bir dik üçlü oluşturur  doğru koordinat sisteminde.
doğru koordinat sisteminde.
Çiftler halinde alınır  Eğri üzerinde aynı noktadan geçen ve eşlik eden üçyüzlünün yüzlerini oluşturan üç düzlemi tanımlayın. Aynı zamanda
Eğri üzerinde aynı noktadan geçen ve eşlik eden üçyüzlünün yüzlerini oluşturan üç düzlemi tanımlayın. Aynı zamanda  Ve
Ve  salınım düzlemini belirleyin (belirli bir noktanın yakınındaki bir eğrinin yayı, salınım düzlemindeki bir düzlem eğrisinin yayı daha yüksek bir doğrulukla aynıdır);
salınım düzlemini belirleyin (belirli bir noktanın yakınındaki bir eğrinin yayı, salınım düzlemindeki bir düzlem eğrisinin yayı daha yüksek bir doğrulukla aynıdır);
 Ve
Ve  - düzleştirme düzlemi;
- düzleştirme düzlemi;
 Ve
Ve  - normal düzlem.
- normal düzlem.
Teğet, normal ve binormal denklemler.
Eşlik eden trihedronun düzlemlerinin denklemleri.
bilmek  Ve
Ve  , veya bunlara eşdoğrusal birim olmayan herhangi bir vektör T, N Ve B Bu bölümde adı geçen denklemleri türetelim.
, veya bunlara eşdoğrusal birim olmayan herhangi bir vektör T, N Ve B Bu bölümde adı geçen denklemleri türetelim.
Bunu yapmak için düz çizginin kanonik denkleminde

ve belirli bir noktadan geçen düzlemin denkleminde
almak  eğri üzerinde seçilen noktanın koordinatları,
eğri üzerinde seçilen noktanın koordinatları,  veya sırasıyla
veya sırasıyla  vektörlerin koordinatlarını alın
vektörlerin koordinatlarını alın  veya
veya  İstenilen çizginin yönünü veya istenen düzleme dik olan yönü belirler:
İstenilen çizginin yönünü veya istenen düzleme dik olan yönü belirler:
 veya
veya  - teğet veya normal bir düzlem için,
- teğet veya normal bir düzlem için,
 veya
veya  - ana normal ve düzleştirme düzlemi için,
- ana normal ve düzleştirme düzlemi için,
 veya
veya  - binormal ve salınımlı düzlem için.
- binormal ve salınımlı düzlem için.
Eğri vektör denklemiyle veriliyorsa  veya
veya  o zaman vektör için
o zaman vektör için  teğetsel olarak yönlendirilebilir
teğetsel olarak yönlendirilebilir 

Bulmak için  Ve
Ve  önce ayrıştırmayı bulalım
önce ayrıştırmayı bulalım  vektörlere göre
vektörlere göre  Daha önce (Sonuç 1) şunu bulduk:
Daha önce (Sonuç 1) şunu bulduk: 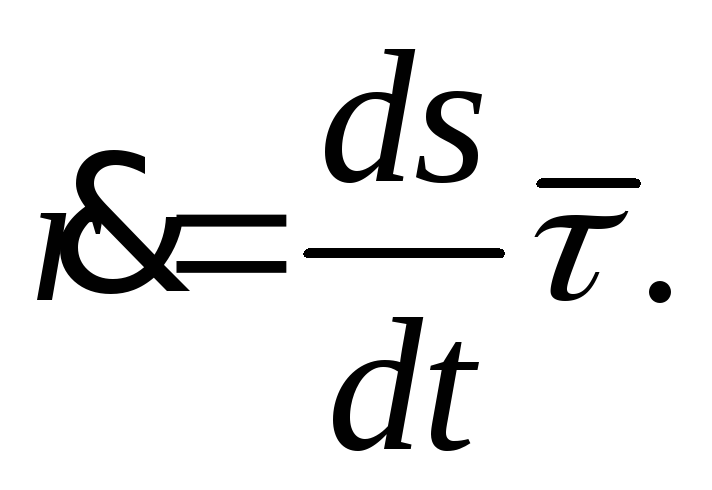 Farklılaştırma
Farklılaştırma  , şunu elde ederiz:
, şunu elde ederiz:
Ama çünkü 

Şimdi vektörel olarak çarpalım  Ve
Ve 
(*) 
Vektör başına (*) temel alınmıştır  , binormal bir yöne sahip olduğundan vektörü alabiliriz
, binormal bir yöne sahip olduğundan vektörü alabiliriz

Ama sonra, çünkü  bu sonuncuların vektör çarpımını alabiliriz:
bu sonuncuların vektör çarpımını alabiliriz:

O. keyfi bir eğri üzerindeki herhangi bir noktada, ona eşlik eden üçyüzlünün tüm elemanlarını belirleyebiliriz.
Örnek. Herhangi bir noktada sağ sarmala teğet, normal ve binormal denklemi.

Teğet 
Ev normal 
Binormal 
Depositfiles'tan indirin
DİFERANSİYEL GEOMETRİ
BEN. SKALER ARGÜMANIN VEKTÖR FONKSİYONU
Vektör fonksiyonu (tanım 1.1), bunu belirtme yöntemleri.
Yarıçap vektörü ve hodograf, parametrik hodograf spesifikasyonu.
Bir vektör fonksiyonunun türevi (Tanım 1.6).
Bir vektör fonksiyonunun türevinin geometrik anlamı.
Vektör fonksiyonlarının türevlenmesine ilişkin kurallar.
1.1. VEKTÖR FONKSİYONUNUN TANIMI
Tanım 1.1Eğer skaler argümanın her değerieşleşen vektör  üç boyutlu uzay R3 , sonra X kümesinde bir skaler argümanın bir vektör fonksiyonunun (veya vektör fonksiyonunun) verildiğini söylerler.T
.
üç boyutlu uzay R3 , sonra X kümesinde bir skaler argümanın bir vektör fonksiyonunun (veya vektör fonksiyonunun) verildiğini söylerler.T
.
Uzayda ise R3 Kartezyen koordinat sistemi belirtildiHAKKINDA
xyz
o zaman görev bir vektör fonksiyonudur  ,
,  üç skaler fonksiyonun belirtilmesine eşdeğerdirX(
T
),
sen
(
T
),
z
(
T
)
– vektör koordinatları:
üç skaler fonksiyonun belirtilmesine eşdeğerdirX(
T
),
sen
(
T
),
z
(
T
)
– vektör koordinatları:
= { X ( T ), sen ( T ), z ( T )} (1.1)
veya , (1.2)
Nerede  — koordinat birim vektörleri.
— koordinat birim vektörleri.
1.2. YARIÇAP VEKTÖRÜNÜN HODOGRAFI OLARAK UZAYAL DOĞRU
Tanım 1.2 Tüm vektörlerin başlangıcı ise,orijine yerleştirilenlere yarıçap vektörleri denir.
Tanım 1.3 Yarıçap vektörlerinin uçlarının geometrik yeri olan çizgiye vektör fonksiyonunun hodografı denir ve bunların ortak başlangıcı hodograf kutbudur.
Eğer parametre T zamandır ve hareketli noktanın yarıçap vektörüdür, bu durumda fonksiyonun hodografı hareketli noktanın yörüngesidir.
Hodograf denklemi şu şekilde yazılabilir: vektör formu(1.2) veya parametrik formda:
 (1.3)
(1.3)
Özellikle vektör fonksiyonuargümandaki bir değişiklikle, yalnızca modülü değişir, ancak yönü değişmez (), o zaman böyle bir vektör fonksiyonunun hodografı, orijinden yayılan doğrusal bir ışın olacaktır; vektörün yalnızca yönü değişirse ancak büyüklüğü değişmeden kalırsa (  ), o zaman vektör fonksiyonunun hodografı, merkezi kutupta olan ve yarıçapı vektörün sabit modülüne eşit olan bir küre üzerinde yer alan bir eğri olacaktır.
), o zaman vektör fonksiyonunun hodografı, merkezi kutupta olan ve yarıçapı vektörün sabit modülüne eşit olan bir küre üzerinde yer alan bir eğri olacaktır.

Şekil 1.
1.3. VEKTÖR FONKSİYONUNUN LİMİT, SÜREKLİLİK VE TÜREVİ
Tanım 1. 4 vektör  vektör fonksiyonunun limiti deniren
vektör fonksiyonunun limiti deniren  , Eğer
, Eğer
 .
(1.4)
.
(1.4)
Tanım 1.5 Vektör fonksiyonu denir bir noktada sürekliT 0, eğer bu noktada bir sınırı varsa, değere eşit Bu noktada vektör fonksiyonları:
 . (1.5)
. (1.5)
Tanım 1.6Bir vektör fonksiyonunun türevi bu noktada T
bir vektör fonksiyonunun artışının argümanın artışına oranının limiti denir  en
en  :
:
 (1.6)
(1.6)
1.4. VEKTÖR FONKSİYONUNUN İLK TÜREVİNİN GEOMETRİK VE MEKANİK ANLAMI
Skaler argümanın vektör fonksiyonunun birinci türevinin geometrik anlamı, bu türevin hodografa teğetsel olarak yönlendirilmiş yeni bir vektör olmasıdır: . Hadi gösterelim.
. Hadi gösterelim.

Şekil 2
Söz konusu vektör fonksiyonunun hodografının, herhangi bir noktada teğeti olan sürekli bir çizgi olduğunu varsayacağız.
Argümanı verelim T
artırma, ardından geometrik olarak oran  bir tür vektör mü
bir tür vektör mü  MM'nin sekantının üzerinde yatıyor. Bu vektör dönüp bir vektöre dönüştüğünde
MM'nin sekantının üzerinde yatıyor. Bu vektör dönüp bir vektöre dönüştüğünde  , teğet üzerinde uzanıyor ve artana doğru yönlendiriliyorT
.
Yani vektör
, teğet üzerinde uzanıyor ve artana doğru yönlendiriliyorT
.
Yani vektör
 (1.7)
(1.7)
artan parametre yönünde yönlendirilmiş bir birim teğet vektör olacaktırT .
Bu nedenle vektör noktasındaki eğriye teğet bir yön vektörü olarak alınabilir), (veya
noktasındaki eğriye teğet bir yön vektörü olarak alınabilir), (veya  ) ve teğet denklemini şu şekilde yazın:
) ve teğet denklemini şu şekilde yazın:
 (1.8)
(1.8)
Eğer T
–
zaman ve — bir noktanın yarıçap vektörü  , taşınıyorum üç boyutlu uzay, sonra yaklaşıkbu ilişkiye segment üzerindeki bir noktanın ortalama hızı denir [T;
T+
, taşınıyorum üç boyutlu uzay, sonra yaklaşıkbu ilişkiye segment üzerindeki bir noktanın ortalama hızı denir [T;
T+ T].
T].
Mekanik anlamdavektör fonksiyonunun birinci türevi, bu türevin M noktasının o anki hızını temsil etmesidirT
: 
Vektör fonksiyonlarının türevlenmesine ilişkin kurallar
Vektörleri çıkarma ve bir vektörü bir sayıya bölme kurallarını kullanarak kural 1'i kanıtlayalım:

Kalan kuralların ispatı kural 1'e ve vektörlerle işlem kurallarına dayanmaktadır.
Örnek 1.1: Bir vektör fonksiyonu verildiğinde.Hodografını oluşturun ve keyfi bir noktadaki teğeti için bir denklem oluşturun.
Çözüm. Herhangi bir nokta için (
X
,
sen
,
z
)
Hodograf vektörü – sahip olduğumuz işlevler:X
=
maliyet
;
sen
=
ayıp
;
z
=
ama
ve bu nedenle herhangi biri için  eşitlik geçerlidirX
2
+
sen
2
=
A
2
,
ve generatrix eksene paraleldir Oz. Eğer parametre
T
zaman olarak yorumlanır, daha sonra bir daire etrafında düzgün hareketle yarıçap vektörünün sonunun düzleme izdüşümüOksi
eksene yansımasıOz
hızda düzgün ve doğrusal olarak hareket edecekB
.
Başka bir deyişle, bir vektör fonksiyonunun hodograf noktasının uygulaması, düzlem üzerindeki izdüşümünün dönme açısıyla orantılı olarak büyür.Oksi
. Bu nedenle istenilen hodograf Şekil 3'te gösterilen forma sahip olacaktır ve buna sarmal çizgi adı verilmektedir. Hodografa (sarmal çizgi) teğetleri bulmak için vektör fonksiyonunun türevini buluruz.
eşitlik geçerlidirX
2
+
sen
2
=
A
2
,
ve generatrix eksene paraleldir Oz. Eğer parametre
T
zaman olarak yorumlanır, daha sonra bir daire etrafında düzgün hareketle yarıçap vektörünün sonunun düzleme izdüşümüOksi
eksene yansımasıOz
hızda düzgün ve doğrusal olarak hareket edecekB
.
Başka bir deyişle, bir vektör fonksiyonunun hodograf noktasının uygulaması, düzlem üzerindeki izdüşümünün dönme açısıyla orantılı olarak büyür.Oksi
. Bu nedenle istenilen hodograf Şekil 3'te gösterilen forma sahip olacaktır ve buna sarmal çizgi adı verilmektedir. Hodografa (sarmal çizgi) teğetleri bulmak için vektör fonksiyonunun türevini buluruz.
Çözüm. O zamandan beri, Daha sonra
Örnek 2.Örneğin üç değişkenli bir fonksiyonu düşünün F(X,en,z), aşağıdaki doğruluk tablosuna sahip:
Matris yöntemi
Mesele şu ki, birçok değişken X N iki parçaya ayrılıyor en M Ve z n-möyle bir şekilde ki vektörün tüm olası doğruluk değerleri en M matrisin satırları boyunca çizilir ve vektörün tüm olası doğruluk değerleri z n-m- sütunlara göre. Fonksiyon doğruluk değerleri F her sette N = ( 1 , ..., M , m+ 1 ,..., N) çizginin kesişmesiyle oluşan hücrelere yerleştirilir ( 1 , ..., M) ve sütun ( m+ 1 ,..., N).
Yukarıda tartışılan Örnek 2'de, değişkenlerin bölümlenmesi durumunda ( x, y, z) alt kümelere ( X) Ve ( y, z) matris şu formu alır:
|
sen,z |
|||||
Önemli özellik matris yöntemi görev, değişken kümelerinin tamamının sağlanmasıdır X N komşu (hem dikey hem de yatay) hücrelere karşılık gelen, bir koordinatta farklılık gösterir.
Tam ikili ağaç kullanmayı belirtme
Açıklama için N-yerel işlev F( X N) yükseklik ikili ağaç özelliği kullanılır N, içindeki her asılı tepe noktasının belirli bir vektör değerleri kümesine bire bir karşılık gelmesinden oluşur X N. Buna göre, bu asılı köşeye, fonksiyonun bu kümede sahip olduğu doğruluk değerinin aynısı atanabilir. F. Örnek olarak (Şekil 1.3), yukarıda tartışılan üçlü fonksiyonun ikili ağacını kullanan bir görevi sunuyoruz. f =(10110110).
Ağacın asılı köşelerine atanan sayıların ilk satırı, kümenin sözlüksel numarasını, ikincisi kümenin kendisini ve üçüncüsü, üzerindeki işlevin değerini belirtir.
Kullanarak görevN - boyutlu birim küpİÇİNDE N
Üst kısımlardan beri İÇİNDE N ayrıca tüm kümelerin kümesine bire bir eşlenebilir X N, O N-yerel işlev F(X N) doğruluk değerlerini küpün karşılık gelen köşelerine atayarak belirtilebilir İÇİNDE N . Şekil 1.4 fonksiyon ayarını göstermektedir F= (10110110) küp üzerinde İÇİNDE 3. Doğruluk değerleri küpün köşelerine atanır.

Tanım . Mantık cebiri Boolean sabitleri ve değişkenleri kümesini, üzerlerinde tanıtılan mantıksal bağlaçlarla birlikte adlandırın.
Formül görevi
Mantıksal cebir fonksiyonları analitik ifadeler olarak belirtilebilir.
Tanım. İzin vermek X― Mantıksal cebirde kullanılan değişkenlerin ve sabitlerin alfabesi, F― tüm temel fonksiyonlar ve bunların 2'yi aşan değişken sayısına sahip genellemeleri için bir dizi gösterim.
X,F Üzerindeki Formül(mantıksal cebir formülü) formun tüm kayıtlarını çağıralım:
A) X, Nerede X X;
b) F 1 , F 1 &F 2 ,F 1 F 2 , F 1 F 2 , F 1 F 2 , F 1 F 2 ,F 1 F 2 ,F 1 F 2 , Nerede F 1 , F 2 - formüller bitti X, F;
V) H(F 1 , … ,F N ), Nerede N > 2, F 1 ,… ,F N- formüller bitti X,F, H ― genelleştirilmiş eşik fonksiyonunun gösterimi F .
Tanımdan da anlaşılacağı gibi, iki basamaklı temel işlevler için, işlevsel sembolün bağımsız değişkenler arasına yerleştirildiği ek gösterim biçimi kullanılır; olumsuzlama ve genelleştirilmiş işlevler için, işlevsel simgenin bulunduğu önek gösterimi kullanılır. argüman listesinin önüne yerleştirilir.
Örnek 3.
1. İfadeler X(enz); ( X, sen, z sen) yukarıda verilen tanımı karşıladıklarından mantık cebirinin formülleridir.
2. İfade X (en z) işlemi yanlış uygulandığı için mantıksal bir cebir formülü değildir .
Tanım. F formülünün uyguladığı fonksiyon değişkenlerin değerlerinin yerine konulmasıyla elde edilen fonksiyondur F. Onu belirtelim F(F).
Örnek 4. Formülü düşünün F=xy (Xz). Uygulanan fonksiyonun doğruluk tablosunu oluşturmak için mantıksal bağlaçların gücü dikkate alınarak mantıksal çarpmanın sıralı olarak yapılması gerekir. xy, o zaman ima ( Xz), daha sonra elde edilen doğruluk değerlerini modülo 2 ekleyin. Eylemlerin sonucu tabloda gösterilmektedir:
|
X z | |||||
Fonksiyonların formülsel gösterimi, fonksiyonların birçok özelliğinin önceden değerlendirilmesine olanak tanır. Formülsel bir görevden doğruluk tablosuna geçiş, her zaman doğruluk değerlerinin formülde yer alan temel işlevlere art arda ikame edilmesiyle gerçekleştirilebilir. Aynı fonksiyon farklı formüllerle temsil edilebildiğinden ters geçiş belirsizdir. Ayrı bir değerlendirme gerektirir.

